Biography
I’m a Research Engineer at Waymo, where I work on advancing the capabilities of autonomous systems. I received my Ph.D. in Computer Science from the University of Maryland, College Park, advised by Prof. Dinesh Manocha in the GAMMA group. I earned my B.S. in Computer Science and Statistics from UMD in 2019, graduating Magna Cum Laude.
My research focuses on equipping autonomous agents with general and adaptable intelligence. To this end, I work at the intersection of large vision-language models, robotic foundation models, autonomous driving, and core computer vision. I have also completed research internships at Amazon Lab126 and Baidu USA.
You can find my CV here. Follow me on X for updates on my latest research!
News
| Jul 2025: | Started as a Research Engineer at Waymo! |
| Jun 2025: | One paper was accepted to IROS 2025 this year! |
| Mar 2025: | One paper was accepted to CVPR 2025 this year! |
| Jan 2025: | One paper was accepted to NAACL 2025 this year! |
| Jan 2025: | Two papers were accepted to ICRA 2025 this year! |
| Sep 2024: | AUTOHALLUSION paper was accepted to EMNLP 2024! The data, evaluation and code are available on GitHub. |
| Jun 2024: | Three papers were accepted to IROS 2024 this year! |
| May 2024: | Returning to Amazon Lab126 as a Research Scientist Intern! |
| Feb 2024: | HallusionBench paper was accepted to CVPR 2024! The data, evaluation and code are available on GitHub. |
| Feb 2024: | LOC-ZSON was accepted to ICRA 2024! |
| Oct 2023: | We release an early report and analysis on failure modes of GPT-4V and LLaVA-1.5. Stay tuned on the release of our dataset HallusionBench! |
| Sep 2023: | GrASPE paper was accepted to RAL! |
| Aug 2023: | iPlan was accepted to CoRL 2023 with oral (6.6%) presentation! |
| Jul 2023: | Crossloc3D was accepted to ICCV 2023! |
| Jun 2023: | VERN was accepted to IROS 2023! |
| May 2023: | TNES was accepted to Autonomous Robots, Springer Nature! |
| May 2023: | Started as a Research Scientist Intern at Amazon Lab126! |
| Jan 2023: | VINet and AZTR were accepted to ICRA 2023! |
| Dec 2022: | Two papers were accepted to RAL this year! |
| Jul 2022: | One paper was accepted to ECCV 2022! |
| May 2022: | Presented my work on ICRA 2022, construction workshop! |
| May 2022: | Started as a Research Scientist Intern at Robotics and Autonomous Driving Lab, Baidu USA! |
| Apr 2022: | TNS was accepted to RSS 2022! |
| Dec 2021: | Successfully defended my MS thesis and started my PhD journey! |
| Oct 2021: | M3DeTR was accepted to WACV 2022! |
| Jun 2021: | One paper was accepted to IROS 2022! |
| Jun 2021: | One paper was accepted to RAL! |
| May 2021: | Started as a Research Scientist Intern at Robotics and Autonomous Driving Lab, Baidu USA! |
| Dec 2020: | Two papers were accepted to RAL this year! |
| Jan 2020: | One paper was accepted to ICRA! |
| Aug 2019: | Started MS at University of Maryland, College Park! |
| May 2019: | Started at GAMMA Lab as a ugrad and worked on TrackNPred! |
Research Interest
- Robotics and Autonomous Driving
- VLM and Fundation Models
- Vision and Perception
Selected Publications
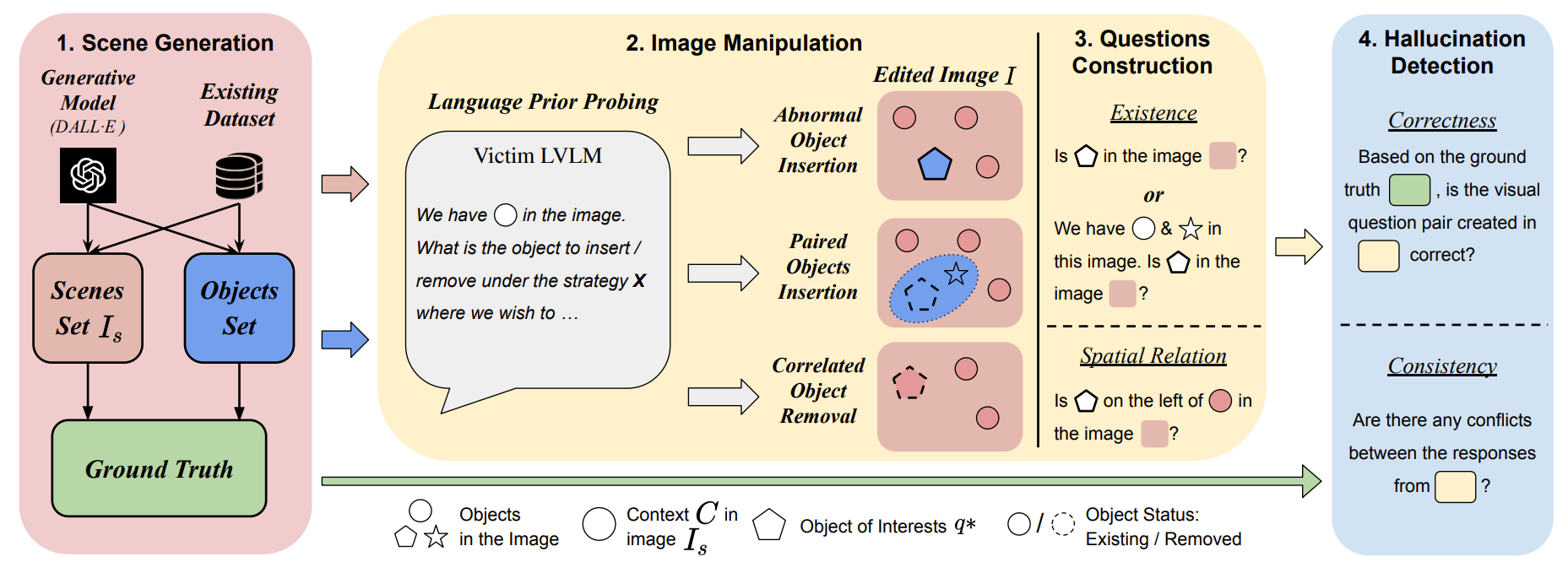 | Tianrui Guan*, Xiyang Wu*, Dianqi Li, Shuaiyi Huang, Xiaoyu Liu, Xijun Wang, Ruiqi Xian, Abhinav Shrivastava, Furong Huang, Jordan Lee Boyd-Graber, Tianyi Zhou, Dinesh Manocha The 2024 Conference on Empirical Methods in Natural Language Processing (EMNLP) 2024. [paper] [webpage] |
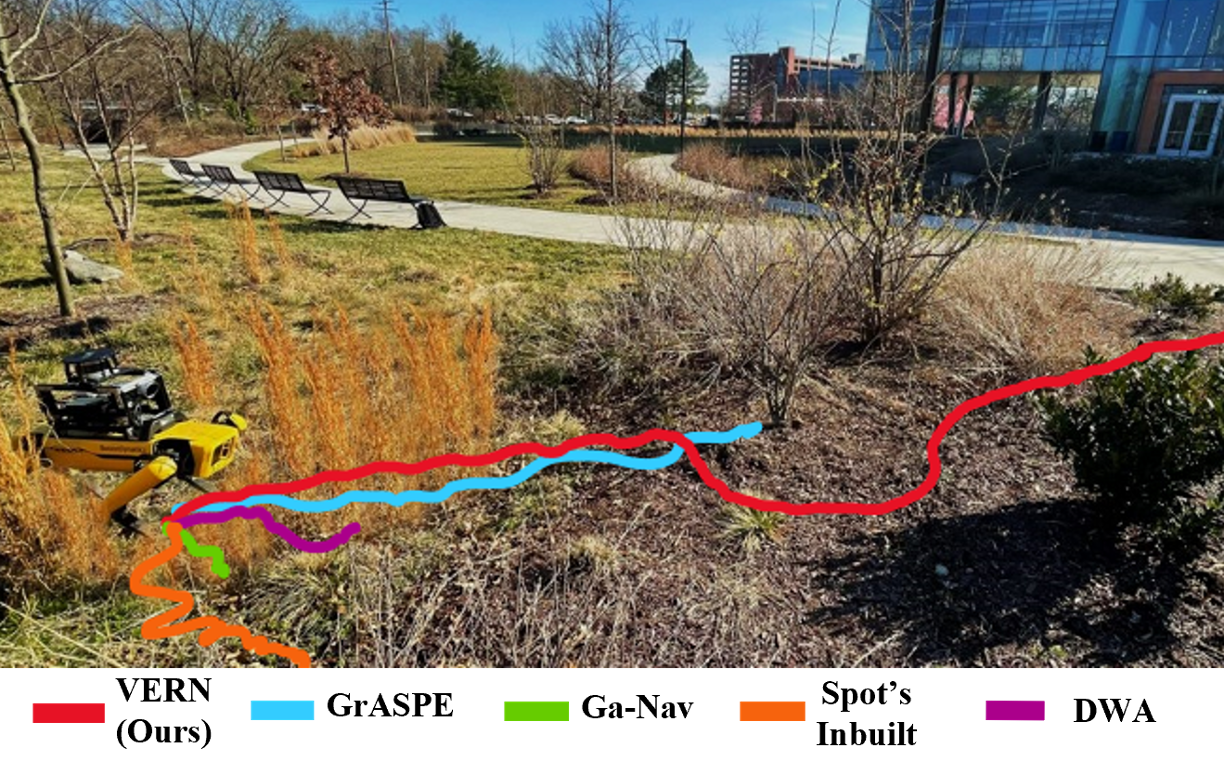
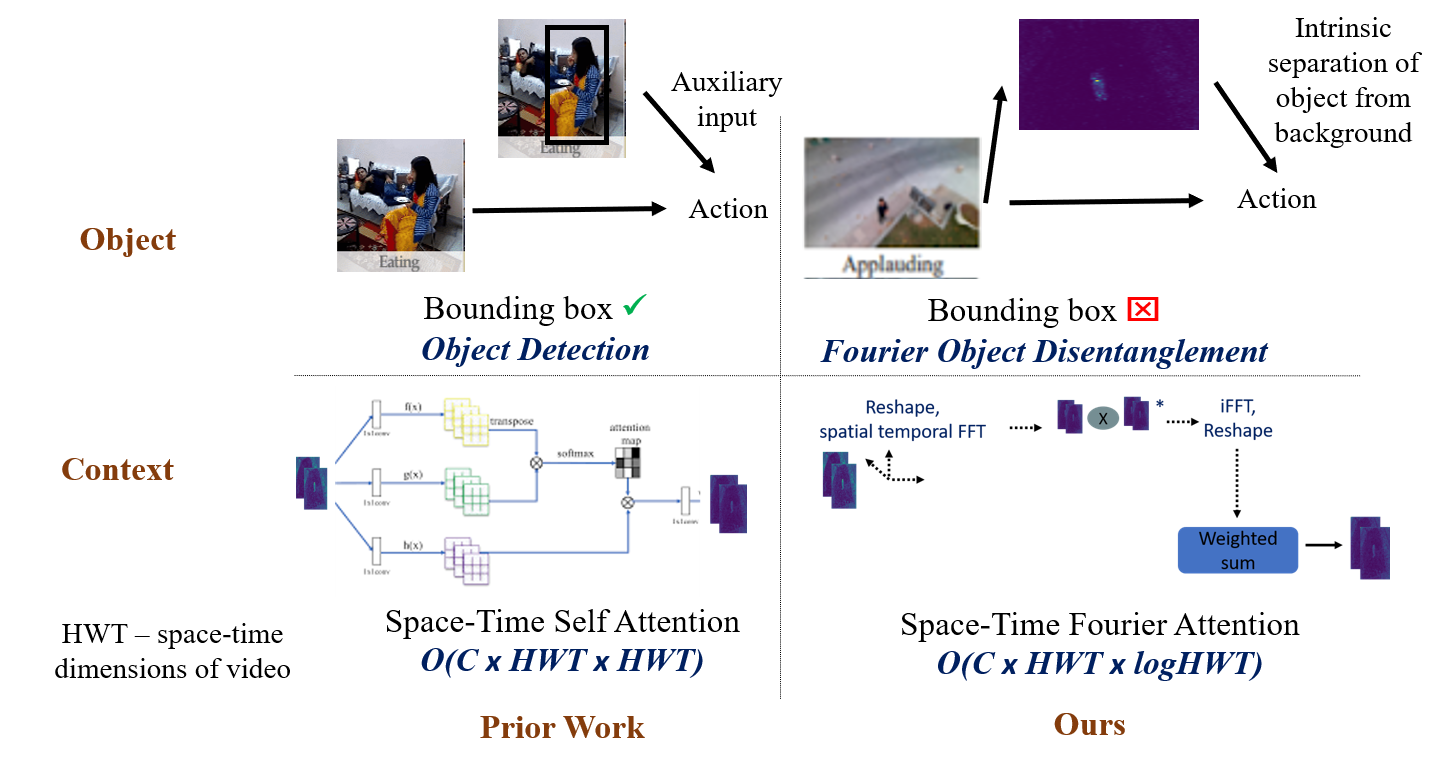
 | Tianrui Guan*, Ruiqi Xian*, Xijun Wang, Xiyang Wu, Mohamed Elnoor, Daeun Song, Dinesh Manocha The 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024. [paper] [webpage] |
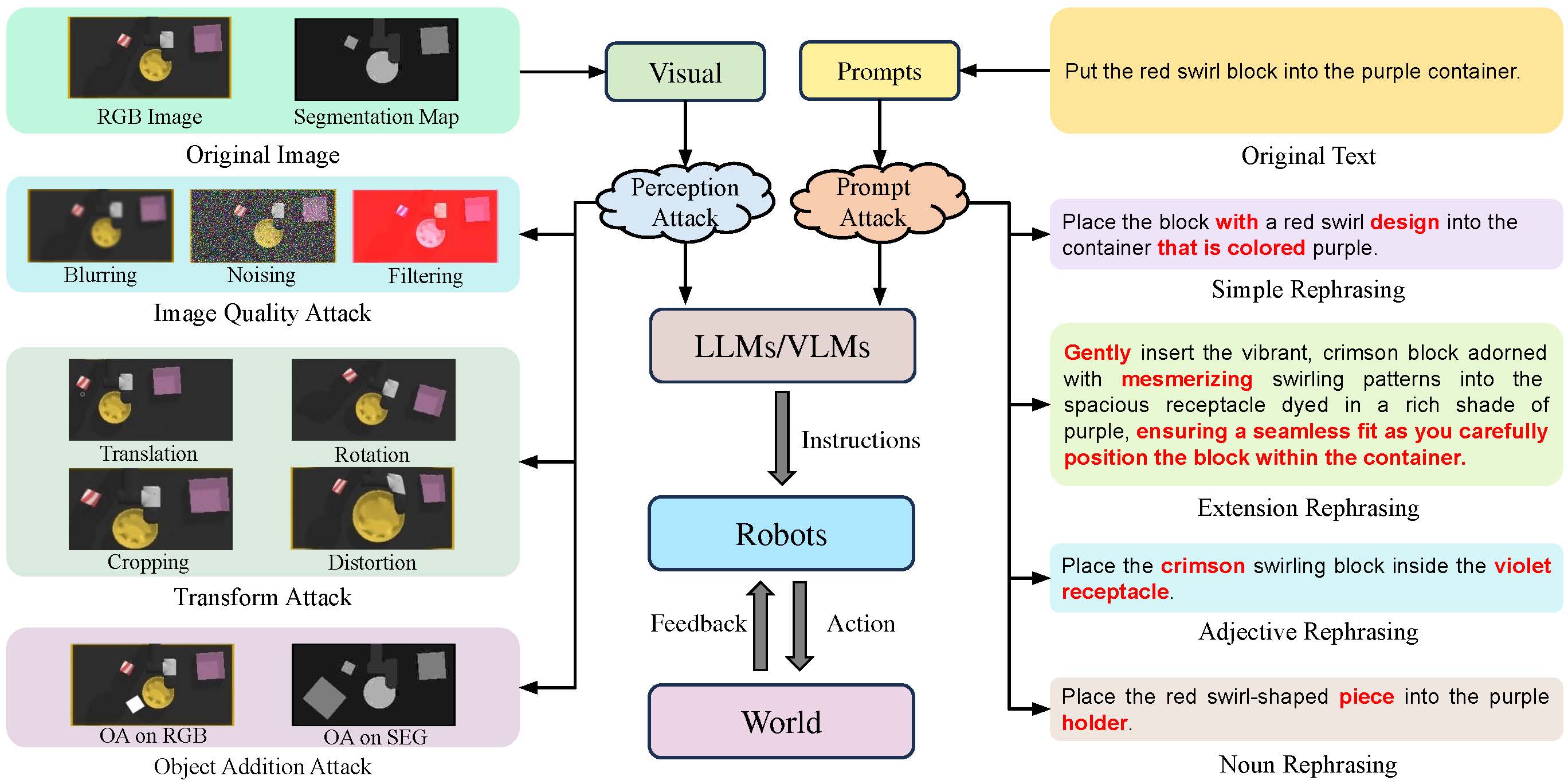 | Xiyang Wu, Souradip Chakraborty, Ruiqi Xian, Jing Liang, Tianrui Guan, Fuxiao Liu, Brian Sadler, Dinesh Manocha, Amrit Singh Bedi arXiv:2402.10340 (Under Review) 2024. [paper] [webpage] [code] |
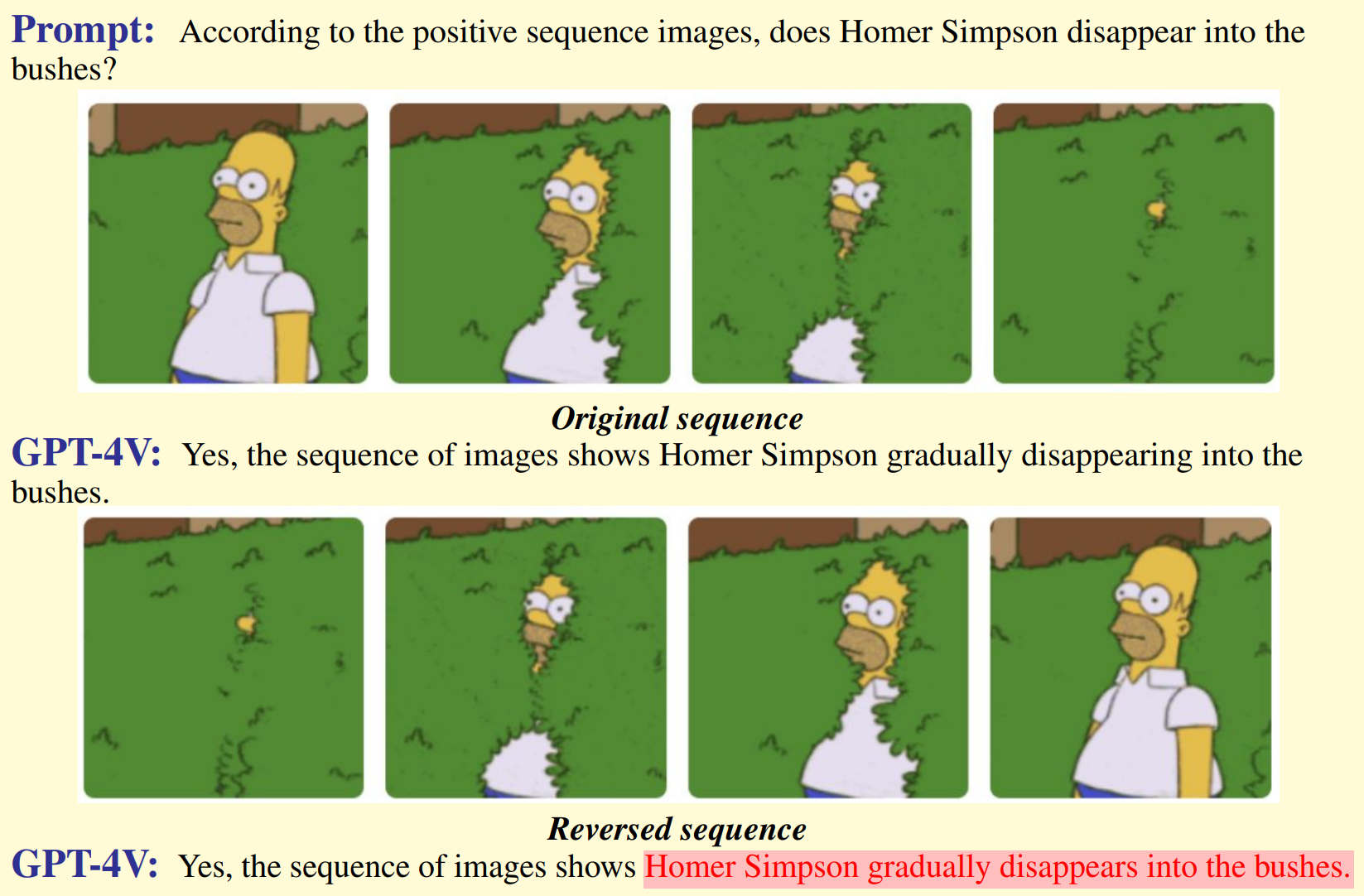 | Tianrui Guan*, Fuxiao Liu*, Xiyang Wu, Ruiqi Xian, Zongxia Li, Xiaoyu Liu, Xijun Wang, Lichang Chen, Furong Huang, Yaser Yacoob, Dinesh Manocha, Tianyi Zhou The 2024 Conference on Computer Vision and Pattern Recognition (CVPR) 2023. [paper] [webpage] [code] |
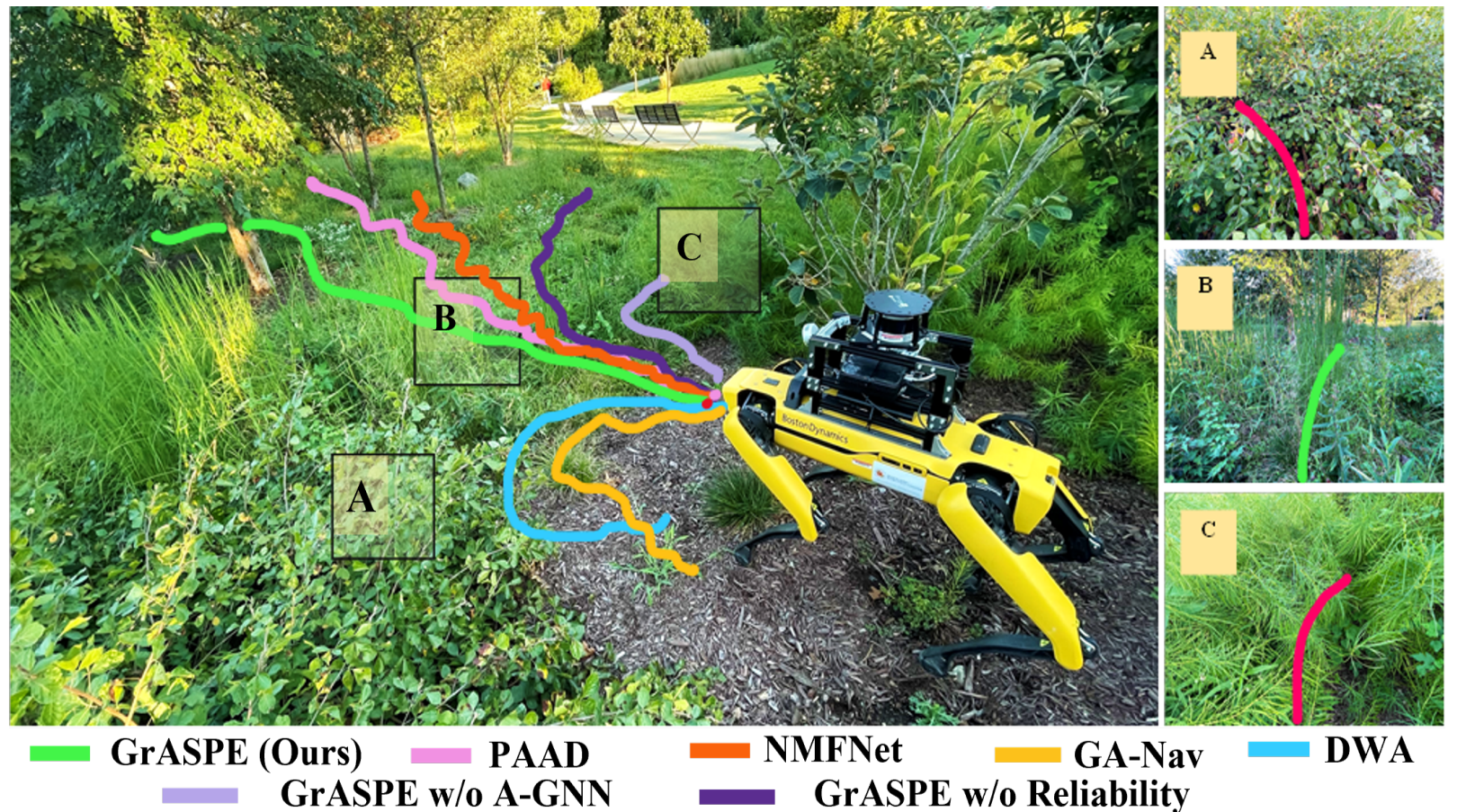 | Kasun Weerakoon, Adarsh Jagan Sathyamoorthy, Jing Liang, Tianrui Guan, Utsav Patel, Dinesh Manocha IEEE Robotics and Automation Letters (RA-L) 2023. [paper] [webpage] |
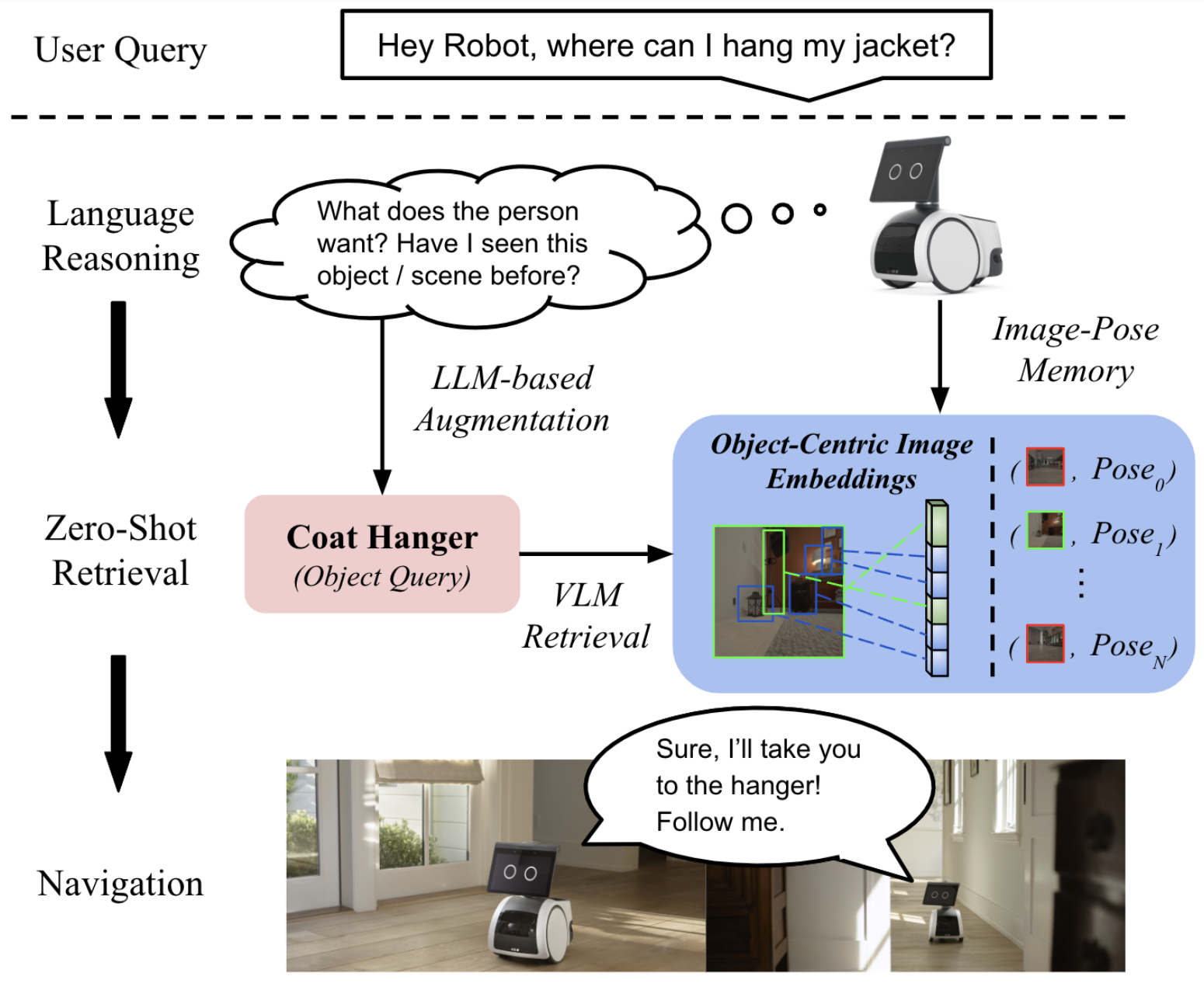 | Tianrui Guan, Yurou Yang, Harry Cheng, Muyuan Lin, Richard Kim, Rajasimman Madhivanan, Arnie Sen, Dinesh Manocha The 2024 IEEE International Conference on Robotics and Automation (ICRA) 2023. [paper] [webpage] |
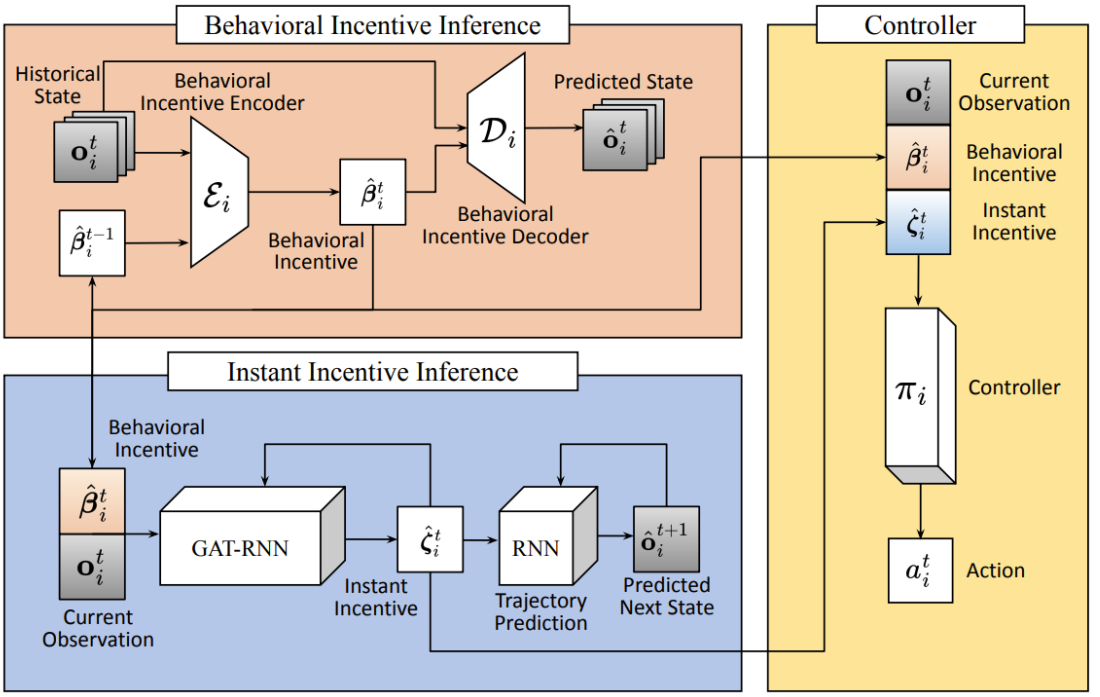 | Xiyang Wu, Rohan Chandra, Tianrui Guan, Amrit Singh Bedi, Dinesh Manocha Conference on Robot Learning (CoRL) 2023. oral (6.6%) Abridged in IROS 2023 Advances in Multi-Agent Learning - Coordination, Peception and Control Workshop. Best Paper and Presentation Award. [paper] [webpage] [code] |
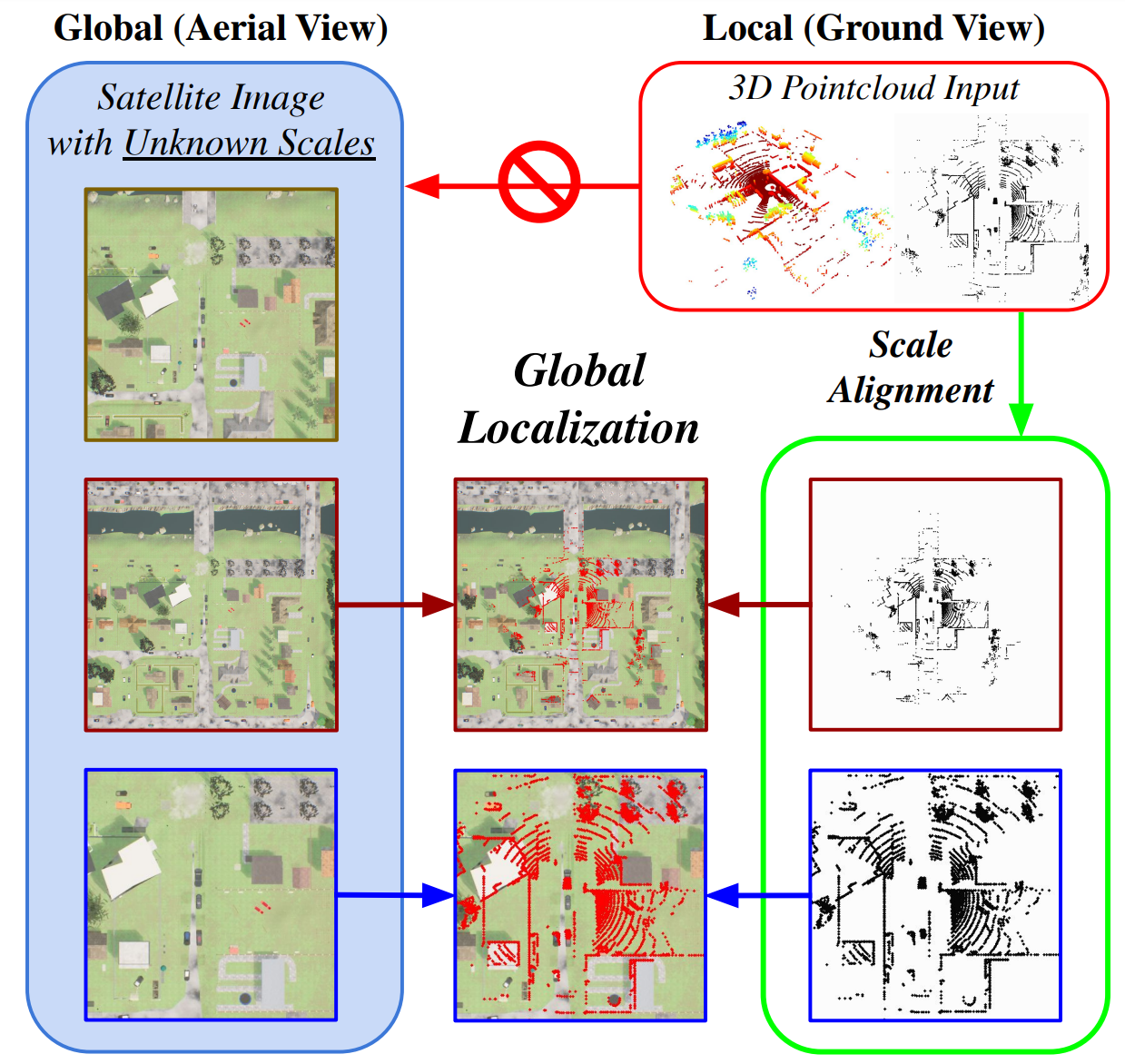
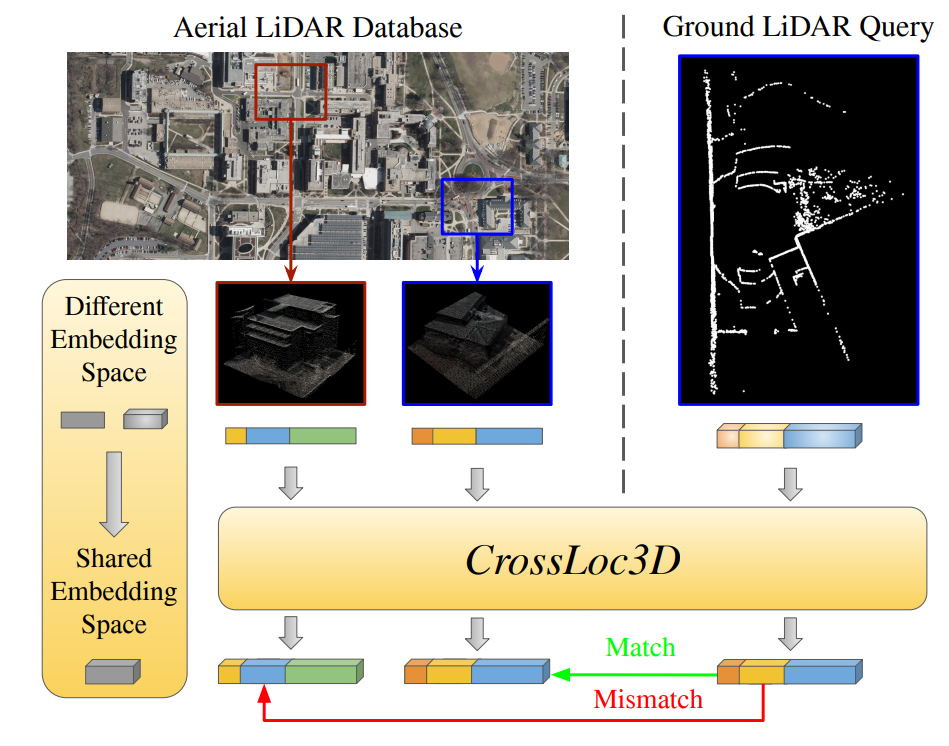 | Tianrui Guan, Aswath Muthuselvam, Montana Hoover, Xijun Wang, Jing Liang, Adarsh Jagan Sathyamoorthy, Damon Conover, Dinesh Manocha International Conference on Computer Vision (ICCV) 2023. [paper] [webpage] [code] |
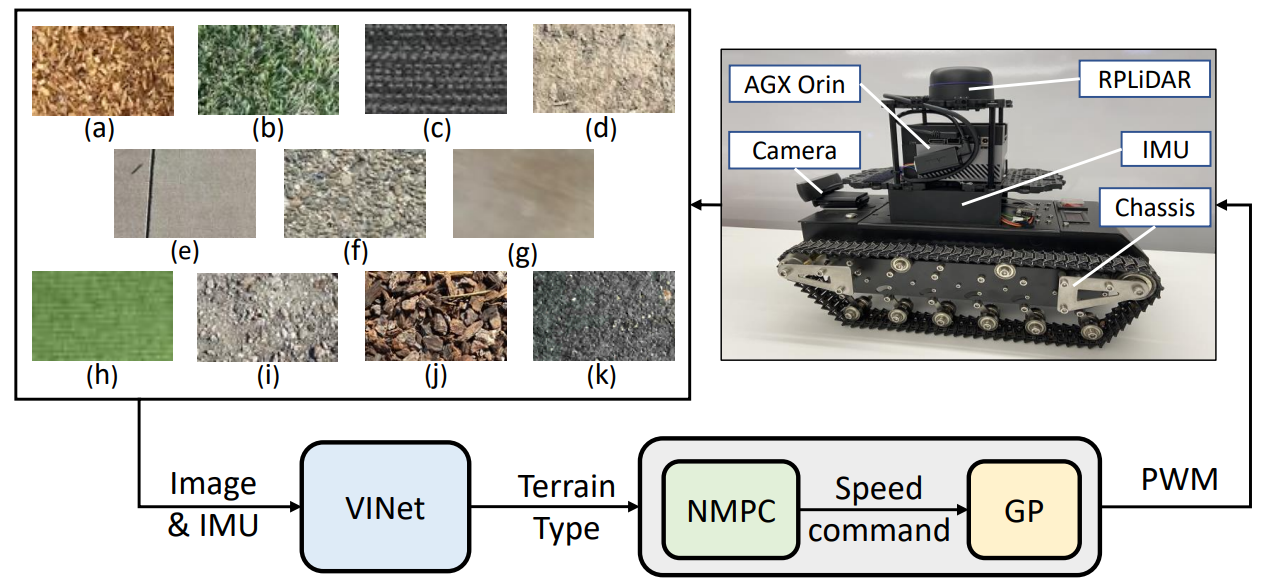 | Tianrui Guan, Ruitao Song, Zhixian Ye, Liangjun Zhang International Conference on Robotics and Automation (ICRA) 2023. [paper] [webpage] |
 | Adarsh Jagan Sathyamoorthy, Kasun Weerakoon, Tianrui Guan, Mason Russell, Damon Conover, Jason Pusey, Dinesh Manocha IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023. [paper] [webpage] |
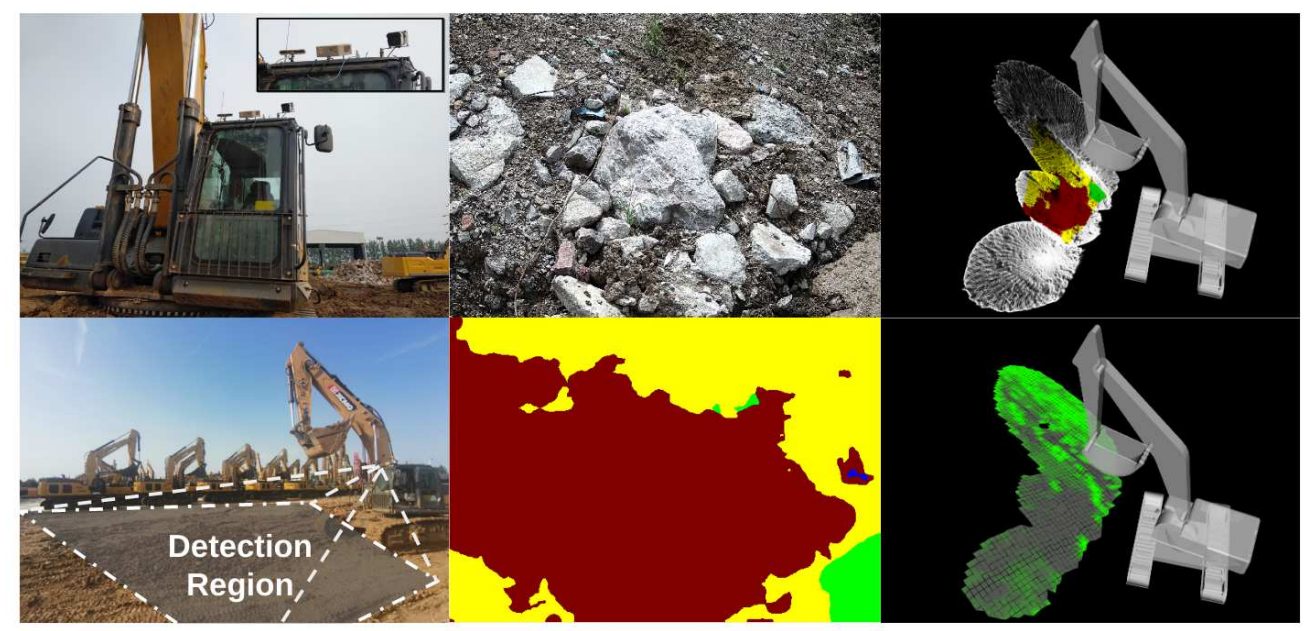 | Tianrui Guan, Zhenpeng He, Ruitao Song, Dinesh Manocha, Liangjun Zhang Robotics: Science and Systems (RSS) 2022. Abridged in ICRA 2022 Construction Workshop. Extended work also appeared in Autonomous Robots as TNES: Terrain Traversability Mapping, Navigation and Excavation System. [paper] [webpage] |
 | Divya Kothandaraman, Tianrui Guan, Xijun Wang, Sean Hu, Ming Lin, Dinesh Manocha European Conference on Computer Vision (ECCV) 2022. [paper] [webpage] [code] |
 | Tianrui Guan*, Jun Wang*, Shiyi Lan, Rohan Chandra, Zuxuan Wu, Larry Davis, Dinesh Manocha Winter Conference on Applications of Computer Vision (WACV) 2022. [paper] [webpage] [code] |
 | Tianrui Guan, Divya Kothandaraman, Rohan Chandra, Adarsh Jagan Sathyamoorthy, Kasun Weerakoon, Dinesh Manocha IEEE Robotics and Automation Letters (RA-L) 2021. [paper] [webpage] [code] |
 | Rohan Chandra, Tianrui Guan, Srujan Panuganti, Trisha Mittal, Uttaran Bhattacharya, Aniket Bera, Dinesh Manocha IEEE Robotics and Automation Letters (RA-L) 2020. [paper] [webpage] [code] |
Please check full list of publications here.