GANav: Efficient Terrain Segmentation for Robot Navigation in Unstructured Outdoor Environments
Tianrui Guan, Divya Kothandaraman, Rohan Chandra, Adarsh Jagan Sathyamoorthy, Kasun Weerakoon, Dinesh Manocha
Published in IEEE Robotics and Automation Letters, 2021
Abstract
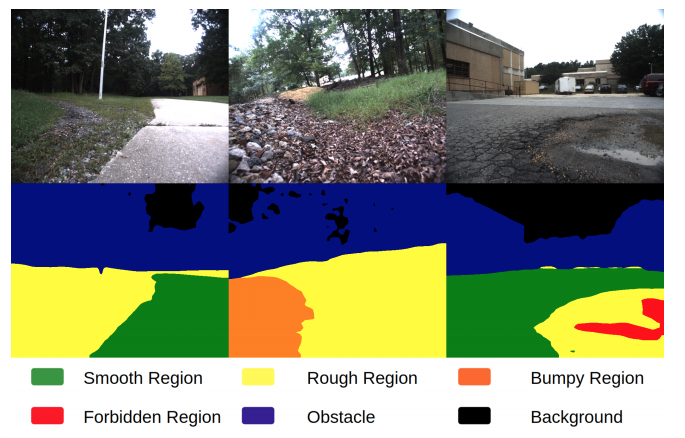
We propose GANav, a novel group-wise attention mechanism to identify safe and navigable regions in off-road terrains and unstructured environments from RGB images. Our approach classifies terrains based on their navigability levels using coarse-grained semantic segmentation. Our novel group-wise attention loss enables any backbone network to explicitly focus on the different groups' features with low spatial resolution. Our design leads to efficient inference while maintaining a high level of accuracy compared to existing SOTA methods. Our extensive evaluations on the RUGD and RELLIS-3D datasets shows that GANav achieves an improvement over the SOTA mIoU by 2.25-39.05% on RUGD and 5.17-19.06% on RELLIS-3D. We interface GANav with a deep reinforcement learning-based navigation algorithm and highlight its benefits in terms of navigation in real-world unstructured terrains. We integrate our GANav-based navigation algorithm with ClearPath Jackal and Husky robots, and observe an increase of 10% in terms of success rate, 2-47% in terms of selecting the surface with the best navigability and a decrease of 4.6-13.9% in trajectory roughness. Further, GANav reduces the false positive rate of forbidden regions by 37.79%. Code, videos, and a full technical report are available at https://gamma.umd.edu/offroad/.
| Paper | Code | Dataset |
|---|---|---|
| GANav | Github | RUGD/RELLIS-3D |
Video
Please cite our work if you found it useful,
@ARTICLE{9810192,
author={Guan, Tianrui and Kothandaraman, Divya and Chandra, Rohan and Sathyamoorthy, Adarsh Jagan and Weerakoon, Kasun and Manocha, Dinesh},
journal={IEEE Robotics and Automation Letters},
title={GA-Nav: Efficient Terrain Segmentation for Robot Navigation in Unstructured Outdoor Environments},
year={2022},
volume={7},
number={3},
pages={8138-8145},
doi={10.1109/LRA.2022.3187278}}