TerraPN: Unstructured Terrain Navigation using Online Self-Supervised Learning
Adarsh Jagan Sathyamoorthy, Kasun Weerakoon, Tianrui Guan, Jing Liang, Dinesh Manocha
Published in IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022

Abstract
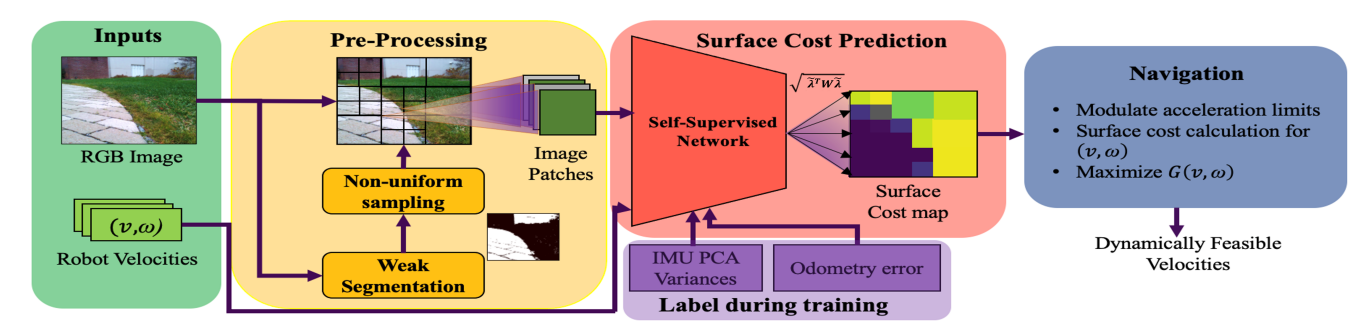
We present TerraPN, a novel method that learns the surface properties (traction, bumpiness, deformability, etc.) of complex outdoor terrains directly from robot-terrain interactions through self-supervised learning, and uses it for autonomous robot navigation. Our method uses RGB images of terrain surfaces and the robot's velocities as inputs, and the IMU vibrations and odometry errors experienced by the robot as labels for self-supervision. Our method computes a surface cost map that differentiates smooth, high-traction surfaces (low navigation costs) from bumpy, slippery, deformable surfaces (high navigation costs). We compute the cost map by non-uniformly sampling patches from the input RGB image by detecting boundaries between surfaces resulting in low inference times (47.27% lower) compared to uniform sampling and existing segmentation methods. We present a novel navigation algorithm that accounts for a surface's cost, computes cost-based acceleration limits for the robot, and dynamically feasible, collision-free trajectories. TerraPN's surface cost prediction can be trained in ~25 minutes for five different surfaces, compared to several hours for previous learning-based segmentation methods. In terms of navigation, our method outperforms previous works in terms of success rates (up to 35.84% higher), vibration cost of the trajectories (up to 21.52% lower), and slowing the robot on bumpy, deformable surfaces (up to 46.76% slower) in different scenarios.
Video
The paper is available here. Please cite our work if you found it useful,
@article{Sathyamoorthy2022TerraPNUT,
title={TerraPN: Unstructured Terrain Navigation using Online Self-Supervised Learning},
author={Adarsh Jagan Sathyamoorthy and K. M. K. Weerakoon and Tianrui Guan and Jing Liang and Dinesh Manocha},
journal={2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year={2022},
pages={7197-7204}
}